偷偷地之前比赛写的东西搬过来doge
舵机上位机下载:https://gitee.com/ftservo/fddebug
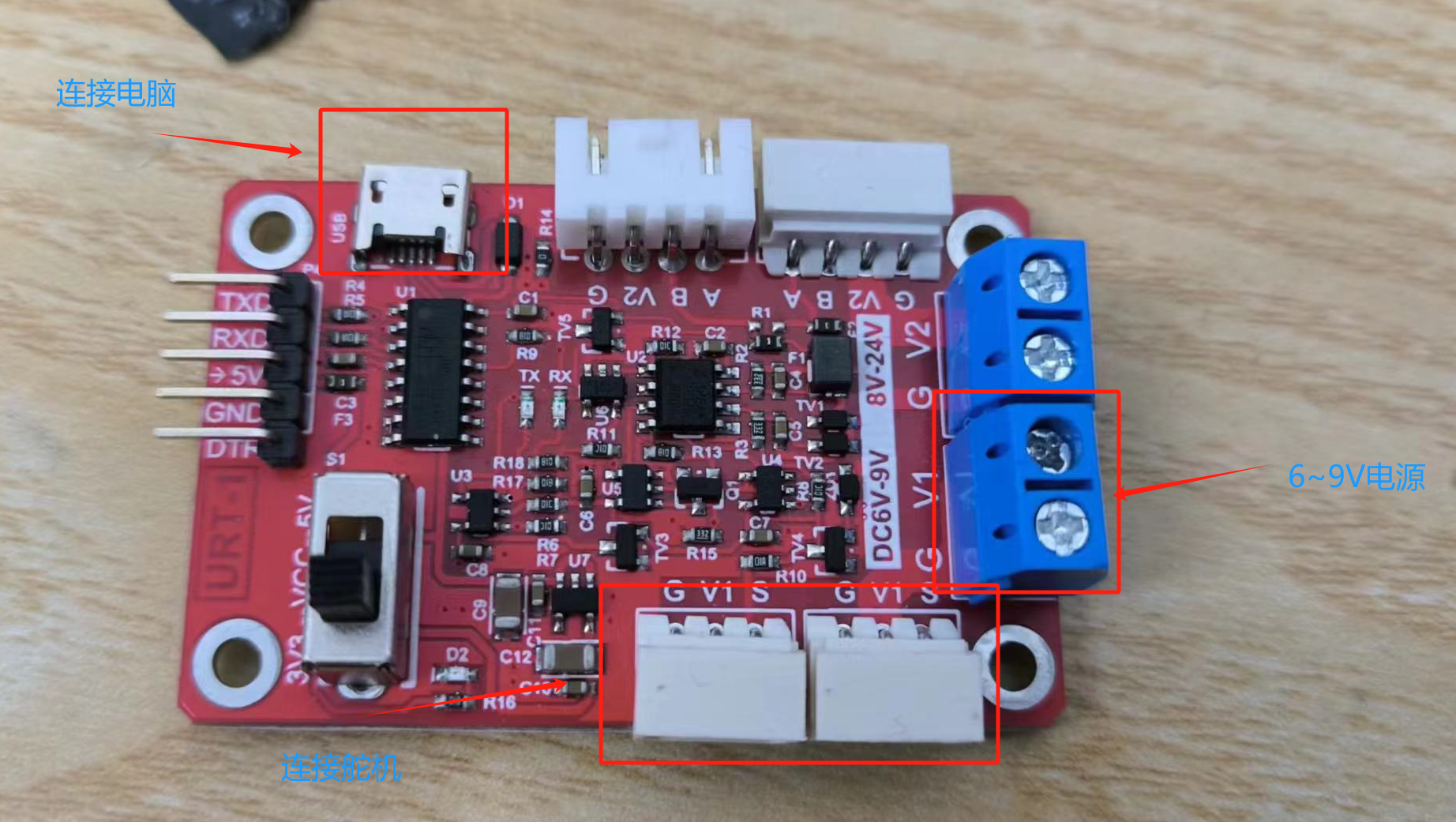
首先电脑连接舵机控制板,舵机控制板连接舵机,舵机控制板连接电源(6~9V),小稳压分一根线即可
每次先连一个舵机,波特率改为(波特率:SCS/STS 系列舵机波特率是 1000000,SMS 系列是 115200)打开端口,然后点击搜索,左下角出现舵机,一定要给舵机控制板上电源,否则找不到舵机。1000000波特率太离谱了,串口收到的只有0。
.png)
例如像这样,点击一个
.png)
点击ID,修改,保存,保证自己车上的舵机每个ID不同即可。点击波特率,改为4(对应波特率为115200),保存。
最后,每个舵机进行如上相同的配置方法即可。
导入stm32工程中
控制舵机的函数为
.png)
第一个参数为舵机ID,第二个参数为舵机位置,后面两个为速度和加速度,基本不需要改。
若只实现最简单的舵机控制操作,连线实际只需两根线,主板的GND连接舵机控制板的GND,主板的USART1的TX连接舵机控制板的TX,主板RX接控制板RX即可(不要怀疑,就是TX连TX,RX接RX)。
当然,现在仅仅当成普通pwm舵机用,之后有机会再完善下吧,能直接读舵机位置